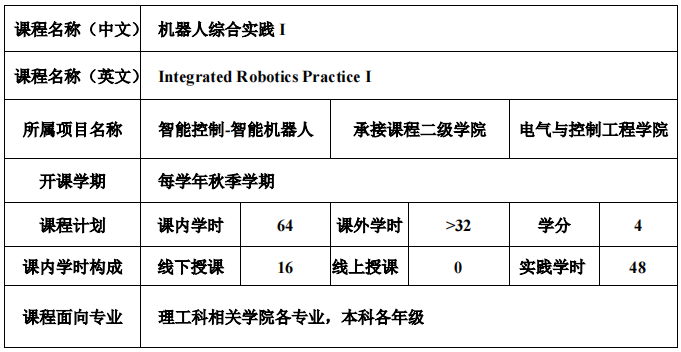
1 课程基本信息
2 课程简介
本课程是面向学校机器人技术相关专业本科生开设的实践类课程。课程面向多个智能机器人应用场景,设立多组成系列的工程实践任务,目标是通过与行业/企业合作,帮助员工通过CDIO的多学科合作实践过程,经历需求分析、方案设计、功能实现、系统调试检验、验收汇报等应用开发环节,学习和研究智能机器人系统的工作原理,培养员工在智能机器人应用场景下的综合应用和工程开发能力。根据员工所属专业的不同,分别进行机器人机械结构、控制系统、算法软件或系统仿真的相关实践。
结课总评成绩由平时成绩和设计成果验收成绩两部分构成。平时成绩包括工作周记、中期进度汇报及答辩;设计成果验收成绩包括功能演示、设计报告、验收答辩。
3 先修课程要求和能力要求
3.1 机器人控制系统开发方向能力要求
先修课程:机器人原理及应用、单片机及嵌入式系统设计、控制系统设计原理、传感器与执行器基础、电路设计与实现,系统建模与仿真等相关专业基础知识1项以上。
能力要求:员工应具备自动化、电气工程及其自动化等专业嵌入式系统硬件电路读图和分析能力、软件分析与编程能力、电源设计能力等,了解机器人控制系统设计的基本流程。
员工应了解机器人的工作原理及应用方法,熟练掌握控制系统分析、设计与实现能力,能够完成传感器的选型、分析、数据处理。
选课和遴选方式:员工自愿报名,课程组进行选拔面试。
3.2 机械结构及外观设计方向能力要求
先修课程:机械原理与机械设计,理论力学及应用,互换性与测量,机械制图与仿真分析等相关专业基础知识1项以上。
能力要求:熟悉机械原理和机械设计,熟悉常用机械标准零件的能力和选型方法,具有良好的理论力学基础,能够完成机械结构校核与分析。熟练掌握机械设计、仿真的相关软件。
选课和遴选方式:课程组进行选拔面试。
3.3 软件与算法方向能力要求
先修课程:数据结构与算法设计,操作系统原理及应用,数据库原理及设计,程序设计语言,计算机组成原理等相关专业基础知识1项以上。
能力要求:熟悉常用的数据结构和算法,能够根据具体问题设计并实现相关数据结构和算法;了解操作系统的工作原理并能够实现基于操作系统的软件设计;了解数据库原理和应用方法;熟练掌握1门以上计算机编程语言,了解计算机组成原理,理解计算机硬件工作原理。
选课和遴选方式:课程组进行选拔面试。
4 课程目标和考核方案
4.1 课程输出目标
根据《机器人综合实践I》项目的总体培养目标,本课程设置了5个课程目标,用JQRSJ-X表示,分别描述如下:
JQRSJ-1:具备对工程实践类综合设计项目技术要求进行分析、分解,进而重构、细化与本专业相关的技术要素的能力,实现组内成员的任务分工;具备根据项目进度目标和团队成员构成统筹规划,制定、调整项目具体进度安排的能力,可以为项目顺利实施提供时间保障;
JQRSJ-2:具备机器人系统分析与设计能力,能够完成控制算法、软件/硬件设计或系统调试;
JQRSJ-3:具备现代工具使用能力,并综合考虑经济等非技术因素,设计出符合项目技术要求和行业规范的系统;
JQRSJ-4:具备系统综合调试能力,能够根据系统功能性测试和综合测试过程中问题现象,分析问题产生原因,并提出解决方案;
JQRSJ-5:具备研究进度汇报和研究报告撰写能力,能够结合行业规范、标准,考虑社会、环境、经济等可持续发展因素,形成内容完备、条理清晰的系统设计报告。
4.2 课程考核方案
本课程采用平时成绩和阶段性成果验收成绩两部分进行考核,平时成绩占40%,其中工作周记(20%)、中期汇报及答辩(20%);成果验收环节占60%,其中样机演示(20%)、设计报告(20%)、验收答辩(20%)。
5 课堂教学内容及资源
本课程课内授课学时16学时,分为5个部分,其中第(4)和第(5)部分分别对应不同方向的员工,具体内容如下:
(1)基于实践项目的需求分析与任务分解(4学时)
授课人:赵仁涛,翟维枫,毕松,企业方教师
内容说明: 所有员工必修
(2)控制系统设计指导(4学时)
授课人:赵仁涛,毕松,翟维枫,企业方教师
内容说明: 机器人控制系统开发方向员工必修,其他方向员工选修
(3)软件/算法设计指导(4学时)
授课人:赵仁涛,毕松,翟维枫,企业方教师
内容说明: 软件/算法开发方向员工必修,其他方向员工选修
(4)机械系统设计指导(4学时)
授课人:赵仁涛,毕松,翟维枫,企业方教师
内容说明: 机械系统开发方向员工必修,其他方向员工选修
(5)机器人系统综合设计指导(4学时)
授课人:赵仁涛,毕松,翟维枫,企业方教师
内容说明: 所有员工必修
6 实践教学任务和要求
课程结课基本条件详见任务书附件。实践课内学时48学时,课外学时不少于32学时。
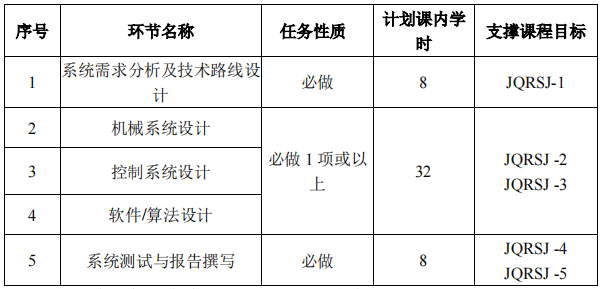
1) 系统需求分析及任务分解环节:≥8学时
 结合课题设定的机器人实际作业任务,考虑环境因素,确定机器人的功能需求,完成技术路线设计。
结合课题设定的机器人实际作业任务,考虑环境因素,确定机器人的功能需求,完成技术路线设计。
2) 机械结构设计、制造与调试:≥32学时
完成机器人机械结构设计及配套驱动选型。完成机械零件设计和仿真验证,完成加工图纸设计,并完成结构加工和组装调试。
3) 控制系统设计、仿真与调试:≥32学时
分析目标系统特性并根据目标功能需求建立被控对象的系统仿真模型。设计控制系统结构并建立控制系统的仿真模型,同时完成系统仿真与调试;
完成控制系统相关传感器和执行器的选型,完成控制系统的组成方案设计;
完成控制器硬件设计方案,完成控制器硬件原理图设计方案论证及优化,完成控制器PCB布线及布局规则确定,完成电路板制作、焊接与硬件调试。根据控制系统设计和仿真成果,在设计的控制器硬件平台编程实现系统算法并形成控制器功能样机;
形成控制系统设计部分研究报告。
4) 软件/算法的设计、实现与调试:≥32学时
分析目标功能需求设计软件/算法技术方案;
设计软件/算法系统组成结构,完成软件/算法的架构分析和编程实现;
完成软件/算法系统的联合调试,形成设计报告。
5) 系统综合调试:≥8学时
完成机械结构设计、控制系统或软件/算法调试,评估系统目标功能实现度。从工程实际角度出发,分析系统功能目标、技术路线的改进点并完成改进方案;
形成系统设计报告。


